
данной операции МП. Если функция
|
Вершина графа |
Описание операции |
Временные характеристики выполняемой операции |
Вершины-последователи |
Вероятность Pii |
|
МП, ... МП„ |
1 ... k |
1 ... k |
||
|
XI |
XXXY |
t11
Un |
X2
... — |
1 ... — |
|
Xz |
XYXY |
t21
hn |
X3
... X4 |
Р23 ... p34. |
|
. |
. |
. |
. |
|
|
|
. |
. |
. |
. |
|
|
|
|
|
|
|
Xk |
YYXX |
tk1
tkn |
— ... — |
0 ... 0 |
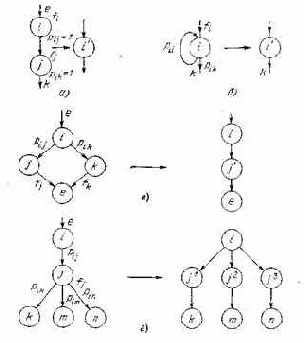
Рис. 3.4. Преобразования графовой модели:
а — последовательное сокращение

6 — устранение петли

в — параллельное сокращение
г — декомпозиция вершины
данной операции МП. Если функция вершины отображает запрос ввода-вывода или другую операцию взаимодействия с МПУ, то в этом случае время выполнения для нее задается извне модели. Значения параметра гц определяется исходя из быстродействия соответствующих МПК с учетом разрядности представления операндов, которая определяется на этапе анализа алгоритма. Для операторов языка моделирования, не имеющих аналогов по выполняемой функции в системах команд МП, разрабатываются подпрограммы или аппаратные процессоры реализации этих операторов. Время выполнения подпрограмм может имеряться средним значением t и дисперсией о2.
Вершины-последователи представляют собой вершины графа, использующие результаты вычисления, произведенного на данном шаге программы. Они описываются своим номером. Заключительный элемент содержит значение вероятности передачи управления в ту или иную вершину-последователь. Сумма вероятностей передачи управления одной, неконечной вершины равна 1. Если вершина-последователь единственная, то передача управления в эту вершину осуществляется с вероятностью, равной 1. Конечная вершина не содержит вершин-последователей. Число столбцов этого элемента, как и предыдущего, определяется максимальным числом вершин-последователей.
Описание модели в табл. 3.3 не является исчерпывающим. В зависимости от цели, преследуемой при разработке модели, таблица может быть дополнена другими элементами, например значением емкости памяти или числом регистров общего назначения (РОН), значением погрешности вычисления соответствующего оператора и т. п.
Итак, графовая модель программы не зависит от типа МП, его системы команд и позволяет оценить быстродействие и точность реализации алгоритма на заданном наборе МП.
3.3. АВТОМАТИЗАЦИЯ ВЫБОРА ТИПА И ЧИСЛА МИКРОПРОЦЕССОРОВ
На этапе выбора типа и числа МП решается одна из сложных задач проектирования МПУ: оценка вариантов использования аппаратных средств и программного обеспечения для реализации исходного алгоритма (А). Кроме того, определяется тип и число МП, обеспечивающих решение заданного алгоритма А в реальном масштабе времени (ТПр<Т) и с заданной точностью (б<бдоп).
Исходными данными для выбора типа и числа МП являются результаты анализа решаемого алгоритма и графовая модель программы, рассмотренная в § 3.2. Заданный алгоритм реализуется на элементной базе, которая может быть представлена, например, в виде табл. 3.4.