
даны количественные оценки уровня
|
bсф1 |
bк1 |
Ксф=1 |
КК = 1 |
ксф=1, Кк=0,99 |
Ксф=1, Кк=0,95 |
kсф=1. |
kн=0,9 |
||
|
UЗw/Uw ДБ |
U-w/UW, ДБ |
U3w/Uw, ДБ |
U
— w/Uw, дБ |
UЗw/Uw, ДБ |
U
— w/Uw, ДБ |
UЗw/Uw, дБ |
U — w/UW, дБ |
||
|
0 |
0 |
— |
— 46 |
— 32 |
— |
— 26 |
|||
|
0,01 |
0 |
— 50 |
— 40 |
— 50 |
— 36 |
— 50 |
— 29 |
— 50 |
— 24 |
|
0,05 |
0 |
— 36 |
— 25 |
— 36 |
— 26 |
— 36 |
— 23 |
— 36 |
— 20 |
|
0,10 |
0 |
— 30 |
— 21 |
— 30 |
— 20 |
— 30 |
— 19 |
— З0 |
— 17 |
|
0,01 |
0,01 |
— 44 |
— |
— 44 |
— 46 |
— 44 |
— 32 |
— 44 |
— 26 |
|
0,05 |
0,01 |
— 39 |
— 28 |
— 35 |
— 27 |
— 34 |
— 24 |
— 34 |
— 21 |
|
0,10 |
0,01 |
— 30 |
-22 |
— 29 |
— 21 |
— 29 |
— 19 |
— 29 |
— 18 |
|
0,05 |
0,05 |
— 30 |
— |
— 30 |
— 47 |
— 30 |
— 32 |
— 30 |
— 26 |
|
0,10 |
0,05 |
— 27 |
— 27 |
— 27 |
— 26 |
— 26 |
-23 |
— 26 |
__21 |
Отклонения разности фаз квадратурных составляющих от 90° также приводит к появлению ложных сигналов на частоте — Q. При разности фаз ф для гармонического входного сигнала сигнал на выходе ФК можно записать в виде

В табл. 3.2 приведены количественные оценки уровней ложных сигналов, обусловленных отклонением разности фаз каналов от 90.
Используя табл. 3.1 и 3.2, разработчик должен оценить допустимые искажения, определенные заданным динамическим диапазоном входного сигнала d. Если эти искажения велики, то необходимо либо предусмотреть коррекцию искажений, либо отказаться от ФК и перейти к дискретизации сигналов на несущей частоте w (см. § 3.4).
Алгоритм спектрального анализа включает следующие этапы:
1. Формирование подмассивов входных данных. Из массива входных отсчетов s(ri) формируется L подмассивов выходных отсчетов yi(n), где I — номер подмассива .(l=1,L). Соотношения между отсчетами подмассивов и исходного массива определяет алгоритм выбора подмассивов

где Дl — задержка подмассива относительно начала массива; Ni — число отсче-тов подмассива. Параметры N, Ni, Тя, А1 определяются из анализа исходных данных. Число отсчетов на интервале обработки N = TmlTa, где Ти — длитель-ность интервала обработки. Значение Tи определяется требуемым расстоянием между центральными частотами соседних фильтров: rH=l/6f. Частота дискретизаций входного сигнала при использовании ФК Fa>ДF, число отсчетов N=ДF/бf. В данном случае N=Ni. Число подмассивов определяется соотношением между длительностью интервала обработки Ти и длительностью обрабатываемого сигнала Тс: L=TCITS. С помощью БПФ производится вычисление «скачущих» спектров на интервалах длительностью N, сдвинутых на величину скачка N3, причем Na=Al/TR. Обычно в задачах спектрального анализа N3 составляет 1/4, 1/2 или 3[4N [2]. Полученные результаты анализа исходных данных определяют требования к схеме сопряжения и периферийным устройствам МПУ, выполняющего спектральный анализ.
Таблица 3.2
|
Аф, град |
0,10 |
0,15 |
0.20 |
0,30 |
0,35 |
0,40 |
0,45 |
0,50 |
0.6S |
0,60 |
0,65 |
0,70 |
0,85 |
1,00 |
|
Лбл. ДБ |
59,2 |
57,0 |
55,2 |
51,3 |
50,3 |
49,2 |
48,1 |
47,0 |
46,2 |
45.6 |
44.8 |
44,1 |
42,7 |
41,2 |
Этот этап вводится в том случае, если при обработке входного сигнала с динамическим диапазоном d уровень ложных сигналов, обусловленных нелинейностью ФК, превысит допустимый.
3. Весовая обработка входных подмассивов. Амплитудная и фазовая характеристики аналоговых фильтров, эквивалентных выходным отсчетам БПФ, определяются модулем и фазой весовой функции и (га):
yi(n)=si(n)v(n).
Основные параметры наиболее часто применяемых весовых функций приведены в [2]. Выбор конкретной весовой функции определяется следующими параметрами: уровнем боковых лепестков .До.л, крутизной ската S, полосой пропускания фильтра Дf. Отметим, что уровень боковых лепестков с использованием прямоугольной весовой функции [v(n) = 1 при l<n<N] составляет — 13 дБ, S= — 6 дБ/октава.
Если требуется более высокое значение Ае.л, то необходимо вводить в алгоритм спектрального анализа этап весовой обработки.
4. Дискретное преобразование Фурье (ДПФ,)

ДПФ вычисляется по алгоритму БПФ (см. § 2.1). Существует множество алгоритмов БПФ, отличающихся друг от друга, главным образом, числом выполняемых операций умножения и сложения. Реализация операции умножения на МП требует значительного процессорного времени. В свою очередь, вычисление ДПФ составляет основную часть времени вычисления спектра входного яодмассива. Поэтому выбор наиболее эффективного (с вычислительной точки зрения) алгоритма БПФ позволит значительно улучшить конструктивные параметры МПУ. Анализ различных типов алгоритмов БПФ выходит за рамки данной книги. Эти вопросы изложены в [2, 42]. Хотелось бы только отметить, что количество элементарных операций, затрачиваемых на выполнение базовой операции (БО), не всегда является параметром, определяющим эффективность алгоритма в целом. Например, аппаратурная сложность МП, реализующего БО вычисления ДПФ по алгоритму числового преобразования Ферма (ЧПФ), примерно в 3 — 6 раз меньше сложности МП БО, реализующего БПФ по основанию 2. Кроме того, для решения задач обработки радиосигналов один комплексный отсчет для обычного БПФ содержит примерно 27 разрядов, в случае ЧПФ одно действительное слово содержит 33 разряда. Поэтому при вычислений операций свертки умеренной длины (до jV=64) аппаратурный выигрыш при использовании ЧПФ-процессора получается значительным. При увеличении длины; обрабатываемого подмассива, выигрыш в аппаратурных затратах на реализацию БО компенсируется увеличением объема памяти [42]. Разрядность представления входных отсчетов можно оценить следующим образом: iBx»]log2 d[,. где ]а[ — ближайшее к а большее целое число. Для спектрального анализа, входных сигналов время вычисления одного выходного отсчета должно быть неболее Tд. Зная допустимое время вычисления T, а также учитывая значения lвх и N, можно ориентировочно выбрать наиболее эффективные для конкретного случая алгоритмы БПФ.
Фильтрация. Частотная характеристика фильтра с бесконечной импульсной характеристикой (БИХ-фильтра) приведена на рис. 3.2. Основными исходными данными являются: частота настройки w0Тя, полоса пропускания по уровню ДА — 2Аw2Тд, полоса пропускания по уровню А — 2Дw1Tд, амплитуда пульсаций в полосе прозрачности 2AwsTд — ДВ и в полосе задержания 2AwrTa — В.
Коэффициент прямоугольности a = Дw1/Дw2. Близость коэффициента прямоугольности а к единице определяется порядком фильтра. Поэтому задача заключается в выборе минимального порядка фильтра, при котором обеспечиваются перечисленные выше параметры. Если использовать при синтезе цифровых фильтров в качестве аналоговых фильтров-прототипов фильтры Баттер-ворта, Чебышева или эллиптические, то для заданных параметров можно рассчитать зависимость порядка аналоговых фильтров от коэффициента прямоугольности, а затем пересчитать эту зависимость для цифровых фильтров. На рис. 3.3 показана зависимость порядка фильтра от коэффициента прямоугольности аналоговых фильтров и цифровых фильтров, причем b = = tg aДw2Tд/tg Дw2Tд.
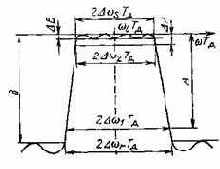
Рис. 3.2. Частотная характеристика цифрового БИХ-фильтра
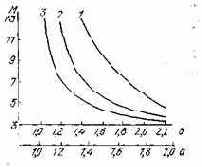
Рис. 3.3. Зависимость порядка фильтра Баттерворта (1), Чебышева (2) и эллиптического (5) от коэффициента прямоугольности
Коэффициенты передачи каскадных цифровых НЧ-фильтров Баттерворта и Чебышева

эллиптических

где М — порядок фильтра (при четных М отсутствует сомножитель перед знаком произведения); Со, С1i, С2i, Dij — коэффициенты фильтра; k0, k1 — масштабирующие коэффициенты.
Анализируя передаточные характеристики фильтров и их исходные данные, можно ограничить число алгоритмов, реализация которых будет рассматриваться на последующих этапах. Если допустимы пульсации частотной характеристики, то целесообразно в качестве прототипа использовать фильтры Че-бышева или эллиптические. Из-за наличия нулей передаточной функции, не равных единице, ошибки и аппаратурные затраты эллиптических фильтров больше, чем фильтров Чебышева того же порядка.
Преимущества эллиптичес ких цифровых фильтров по сравнению с фильтрами Чебышева того же порядка становятся очевидными при коэффициенте прямоугольности а<1,4 за счет меньшего порядка фильтра.
Таким образом, результатом анализа алгоритмов обработки являются основные параметры их реализации: размерность и число входных подмассивов, порядок фильтра, частота дискретизации, уровень боковых лепестков, время обработки и др.
Моделирование алгоритмов. Для выбора наиболее эффективного конструктивного варианта реализации МПУ необходимо обеспечить возможность сравнивать различные варианты друг с другом. Различные системы команд и состав МПК БИС затрудняют решение этой задачи. Поэтому для повышения общности представления алгоритмов и программ применяется их моделирование [43]. Целью такого моделирования является оптимазиция реализуемого алгоритма с точки зрения времени его выполнения на различных МПК БИС. Использование графовых моделей позволяет также исследовать поток данных МПУ и оценить основные характеристики различных структурных вариантов построения МПУ. С помощью графовых моделей можно анализировать микропрограммы, последовательности команд или алгоритм решения некоторой задачи с учетом возможности подключения аппаратных процессоров. Графовые модели алгоритма и программы отличаются только степенью детализации отдельных операторов языка моделирования. ,
Граф программы — это циклический ориентированный граф, вершины X которого представляют различные шаги программы. Вершины связаны друг с другом дугами U, представляющими разветвление и циклы в программе. Граф программы содержит одну начальную вершину х0, предшествующую всем остальным вершинам графа и не имеющую входящих дуг, и одну конечную вершину хк, которая следует за всеми остальными вершинами и не имеет исходящих дуг. Каждой вершине приписывается одно или несколько значений аргументов, которые могут представлять время выполнения данной вершины, погрешность вычисления, потребность в памяти для соответствующего шага программы и т.
п. Для определения времени выполнения программы TпР необходима задать, как минимум, tij — время выполнения i-го шага программы j-м МП.
С каждой дугой иij связывается значение вероятности того,. что из вершины Xi управление будет передано в вершину Xj. Если для дуги значение рц не указано, то оно принимается равным единице.
Важной особенностью графовых моделей является их универсальность. Они могут успешно применяться для оптимизации микропрограмм. В этом случае каждая вершина представляет собой микрокоманду БИС АУ, а дуги указывают последовательность выполнения этих микрокоманд. Такие модели применимы при проектировании, например, МП БО. Необходимость их обусловлена тем, что разработка на микрокомандном уровне моделей алгоритма решения сложных задач, как, например, спектрального анализа, потребует значительного времени и большого объема памяти. В этом случае целесообразно применение блочного многоуровневого моделирования при условии сохранения критериев-на различных уровнях моделирования [44]. Вначале моделируется, например, микропрограмма БО и выбирается оптимальный вариант построения МП БО, затем БО становится сама вершиной-и моделируется уже алгоритм спектрального анализа и т. д.
Графовая модель программы обычно строится на основе ее логической структурной схемы. Построенный граф отображает структуру программы. Затем определяются параметры модели. Некоторая часть этих параметров: размер подмассивов входных данных N, число подмассивов Lп, число этапов вычисления БПФ L, порядок фильтра М, время вычисления базовой операции Tбо, вероятности рij и другие определяются в результате анализа исходных данных реализуемого алгоритма. Другие параметры модели определяются из анализа заданной элементной базы: МПК БИС, их быстродействия, системы микрокоманд и т. п.
В некоторых случаях, когда назначение параметров модели аналитическим путем затруднительно, разрабатывают вначале рабочую версию программы на языке, близком (по составу операторов, распределению регистров и т.
п.) к языку моделирования. Она позволяет проверить логику работы моделируемой программы. Кроме того, некоторые значения параметров модели, например рц, можно получить из анализа этой программы.
Для исследования полученной модели программы обычно требуется ее упрощение. Для корректного проведения такого упрощения принимаются следующие гипотезы: времена выполнения и коэффициенты циклов являются либо константами, либо случайными переменными с независимыми стационарными функциями распределения; вероятности рц не зависят от того, сколько раз выполнялась вершина и откуда было передано к ней управление-В процессе упрощения модели несколько вершин, связанных друг с другом, заменяются одной вершиной с эквивалентными параметрами времени выполнения, вероятностей перехода между вершинами. Некоторые элементарные преобразования графовой модели показаны на рис. 3.4. Параметры fi, ti и б2i представляютчастоту повторения, математическое ожидание и дисперсию времени выполнения вершины Xi. Параметр рij представляет вероятность передачи управления из (вершины х, в вершину Xj.
При упрощении графовой модели программы необходимо тщательно проверить предположения о независимости времени выполнения каждой вершины и вероятности перехода по каждой дуге от параметров других элементов графа. Если существуют вершины, для которых эти предположения неверны, то соответствующие части графа не упрощаются. Упрощения графовых моделей проводятся формальными методами, например с помощью-подсистемы CSS [43].
Модель программы может быть удобно представлена в табличной форме. Существует много способов представления модели; в простейшем из них граф, содержащий n вершин, представляется таблицей из n строк. Каждая строка состоит из следующих элементов: описания выполняемой операции, временных характеристик выполняемой операции для всех исходных МП, указателей-вершин-последователей и значений вероятностей переходов в эти вершины-последователи (табл. 3.3).
В табл. 3.3 дано простейшее описание элементов вершины графа. Описание операции содержит информацию только о выполняемой функции (сложение, вычитание, умножение и т. п.) и представляется кодом. В более сложных случаях описание выполняемой операции может представлять последовательность операторов языка моделирования или при описании действий для определенной вершины модель может использовать генератор случайной величины с заданным распределением и т. п.
Временные характеристики выполняемой операции в простейшем случае представляют собой среднее время tij выполнения: